Eva 3D 스캐너, 인체 공학적 외골격 개발에 사용되다
[요약]: 사람들을 위한 외골격을 만들 때, 한 가지 중요한 문제는 그 사람과 외골격 간의 완벽한 상호 작용을 달성하는 것입니다.
[목표]: 불편함과 스트레스를 방지하기 위해 정확하고 신속하게 환자를 3D 스캔하여 그 결과물인 디지털 모형을 사용하여
석고 주형을 사용하는 것보다 신속하고 쉽게 맞춤형 보조기 제작하기.
[사용 도구]: Artec Eva 및 Artec Studio
브뤼셀 대학의 브리 제 대학 (Vrije Universiteit Brussel)의 박사과정 연구원 Kevin Langlois는
인류는 삶의 방식을 근본적으로 바꿀 기술 혁명의 위기에 처해 있다고 믿고 있습니다.
Kevin은 대학의 로봇 공학 및 다물체 기게장치 (R&MM) 연구 그룹의 구성원으로, 주요 초점 영역은 전원식 외골격과 같은 착용식 로봇입니다.
Kevin은 로봇 보조 기술이 사람들의 이동성을 유지하면서 도움 받는 것에 대한 의존도를 낮추고
움직이지 못하는 것에 의한 2차적인 건강 위험을 줄이기 때문에 의료 비용을 통제 할 수 있는 주요 기술 중 하나라고 생각합니다.
Kevin은 "여기 이 외골격은 근본적인 변화의 일부입니다.
이 기술은 부상 재활 치료, 인력 증가 및 일상 활동의 위험 예방 및 지원 등에 유망한 결과를 보여줍니다." 라고 말했습니다.
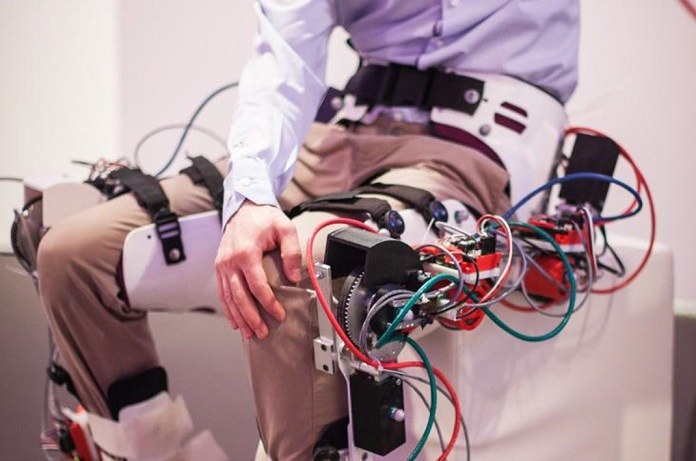
R&MM의 MIRAD, 조절식 보조기가 장착된 전동 보조 외골격
이 연구 분야에서 주목할만한 진전이 있었다는 사실에도 불구하고,
인간과 로봇화 된 외골격 간의 완벽한 상호 작용을 달성하는 방법에 대한 주요한 문제는 아직 해결되지 않았습니다.
기계적 차원에 있어서 이 질문의 해답은 두 개체 사이의 절대적인 접착력을 얻는 방법에 달려 있습니다.
이 질문은 각 사람마다 인체 측정학적 (사지의 크기와 기능)으로나 생체 역학 (사람이 걷는 방식)적으로
독특한 점을 보인다는 것을 감안하면 대답하기 쉽지 않습니다. 이는 각 개인별로 맞춤 솔루션이 필요하다는 것을 의미합니다.
기성품 솔루션이 최선의 선택이 아니라는 것을 R&MM의 경험이 보여줍니다.
처음에 이 그룹은 스트랩과 브래킷으로 몸에 부착시킨 연구용 조절식 보조 도구를 구입하여 시작했습니다.
그러나 이러한 비품은 자주 잘못 배치되어 외골격 성능이 비효율적이었습니다.
대안 솔루션을 찾았는데, 바로 3D 스캐닝을 사용하여 피사체의 개별 해부체를 포착하고 원활하게 복제 할 수 있는 보조기를 설계하는 것입니다.
특히, 외골격의 물리적 접속기는 인간과 로봇 간의 기계적 연결이기 때문에 3D로 스캔합니다.
이 방법을 사용하면 사용자의 편안함을 유지시킨 채 보다 견고한 접착력으로 외골격의 견고성을 높일 수 있습니다.
이를 위해 Artec의 골드 파트너인 4C Creative CAD CAM Consultants에서 Artec Eva 고정밀 3D 스캐너를 구입했습니다.
"현재 이 분야에 대한 연구는 거의 없습니다. 지금까지 대부분의 연구는 이 기계의 기초, 작동 및 제어에 중점을 두었습니다.
이제는 인간을 이 시스템에 통합 할 시간이 되었습니다. 따라서 R&MM 연구소에서는
3D 스캐닝 기술을 사용하여 새로운 솔루션을 개발하기로 결정했습니다." Kevin씨가 언급하였습니다.
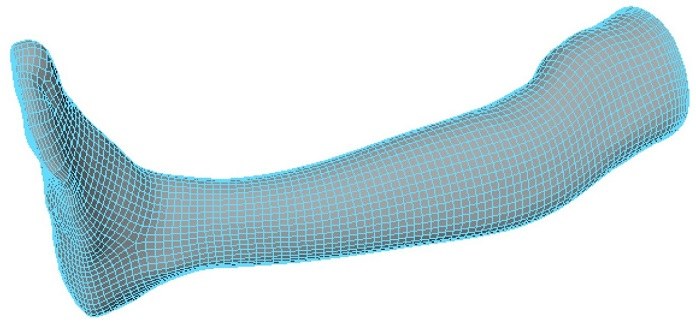
Artec Eva 3D 스캐너를 사용하여 재구성한 정강이의 디지털 모델
"이제 우리는 Artec Eva를 사용할 것입니다.
이 장치는 조절식 보조기에 비해 장점이 많은 개별 보조기를 설계하고 생산하는 데 도움이 됩니다.
Eva 스캐너는 환자의 디지털 이미지를 편집하는 데 빠르고 (5 분 미만) 정확한 스캔 프로세스를 제공합니다.
또한, 3D 스캐닝 장치를 사용하여 보조기를 생산하는 것은 석고 몰드를 사용하는 것보다 시간과 노력이 적게 들어갑니다."
Kevin이 Artec Eva에 대한 의견을 말해주었습니다.
생체 역학 문헌을 토대로 대상의 관절 (발목, 무릎 및 엉덩이)에 전달해야 하는 회전력 또는 힘을 추정 할 수 있습니다.
MIRAD 외골격 장치가 엉덩이, 무릎 및 발목 관절에 힘을 주는 것을 통해 보행에 도움을 주기 위해서 입니다.
통증 압력 임계치 (PPT)에 대한 정보, 즉 통증을 느끼기 전에 인간이 특정 해부학적 영역에서 견딜 수 있는 최대 압력과 함께
교정용 프로토타입을 설계할 수 있습니다.
작동기의 핵심 기능은 가변 요소(가변적인 하중을 가진 탄성)와 전기 구동의 연속적인 사용입니다.
이 제품의 특성은 에너지 저장, 피크 전력 공급 증가, 충격 하중에 대한 내성 및 낮은 출력 임피던스 등으로 외장형 외골격에 매우 적합합니다.
톱니바퀴 구성과 같은 기존의 "딱딱하거나" 또는 "뻣뻣한" 작동기와는 달리 이 호환 작동기는 사용자가 외부 힘을 가했을 때
자연스럽게 목표 위치에서 벗어날 수 있습니다.
Kevin은 "Artec Eva 3D 스캐너를 사용하면 이러한 모든 매개 변수를 소형의 인체 공학 보조기에 통합시킬 수 있습니다.”라고 말했습니다.

R&MM 연구소에서 피사체의 정강이 3D 스캔
맞춤형 보조기를 만들기 위해 Kevin씨는 먼저 캡처해야 할 영역 (예 : 정강이)을 선택합니다.
그런 다음 그는 보조기를 테스트하게 될 하나 이상의 대상을 선택합니다. 그 대상들을 스캔하여 데이터는 Artec Studio 3D 소프트웨어에서 처리합니다.
" Artec Studio 내에서 스캔으로 .STL 파일을 생성하는 것은 간단한 과정입니다.
중요한 포인트는 고품질 스캔을 수집하고 모델에 구멍을 남기지 않으며 스캔 정렬을 용이하게 하는 것입니다.
Sharp Fusion 도구는 스캔을 정확하게 통합하여 최종 모델을 생성합니다. 저는 Artec Studio 소프트웨어가 직관적인 인터페이스와 더불어
과학자와 엔지니어가 웨어러블 로봇 분야의 연구를 수행 할 수 있게 해주는 강력한 도구를 제공한다고 결론을 내렸습니다.” Kevin이 말했습니다.

개별 교정용 프로토타입의 디지털 설계
후처리 후, .STL 파일로 딱 맞는 교정 장치를 설계할 수 있도록 CAD 소프트웨어로 내보내집니다.
마지막 단계는 첨가제 제조를 사용하여 보조기를 제작하는 것입니다. 보조기를 3D 인쇄한 후, 탄소 섬유와 에폭시 복합 재료로 보강합니다.
3D 스캐닝과 3D 인쇄를 사용하면 디지털 기록을 파일로 저장할 수 있으므로 석고 몰드를 사용하는 것과는 대조적으로 유용합니다.
디지털 기록은 피사체가 인간을 로봇 디자인에 완전히 통합시킬 수 있게 해주기 때문에 설계 관점에서 이점이 있습니다.
또한 보조 장치의 생산 또는 제조 옵션에 대한 자유를 주어 3D 인쇄와 같은 CAM (컴퓨터 응용 가공, Computer Aided Manufacturing) 기술을
사용할 수 있게 합니다. 이는 잠재적으로 비용을 절감하고 제품의 품질과 적용 가능성을 향상시킬 수 있습니다.
현재 이 디자인의 이점을 확인하기 위한 실험이 진행 중입니다.
"이 실험의 목표는 피실험자의 디지털 기록을 기반으로 한 개별 보조기의 효과를 입증하는 것입니다.
언젠가 목표는 외골격이 다른 사람과 더불어 어느 정도는 착용자 자신에게도 거의 보이지 않게 하는 것입니다.
3D 스캐닝 기술은 이를 달성하기 위한 유망한 도구입니다." Kevin은 말했습니다.
ㅡ ◆ ㅡ
3D 스캐너 구매 및 3D 스캐닝/역설계는 프로토텍에 맡기세요.







